messaging – Messaging¶
An EV3 Brick can send information to another EV3 Brick using Bluetooth. This page shows you how to connect multiple bricks and how to write scripts to send messages between them.
Pairing two EV3 Bricks¶
Before two EV3 bricks can exchange messages, they must be paired. You’ll need to do this only the first time. First, activate bluetooth on all EV3 bricks as shown in Figure 19.
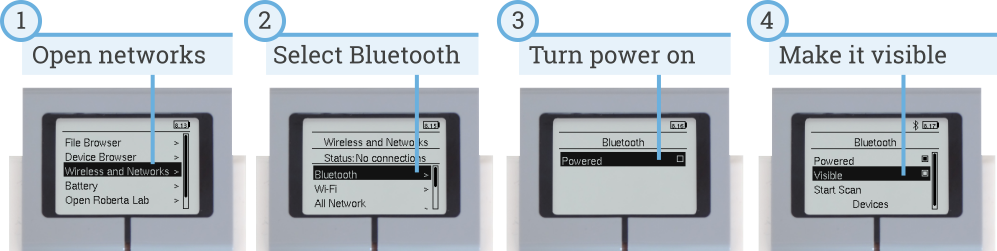
Figure 19 Turn on Bluetooth and make Bluetooth visible.
Now you can make one EV3 Brick search for the other and pair with it, as shown in Figure 20.
Once they are paired, do not click connect in the menu that appears. The connection will be made when you run your programs, as described below.
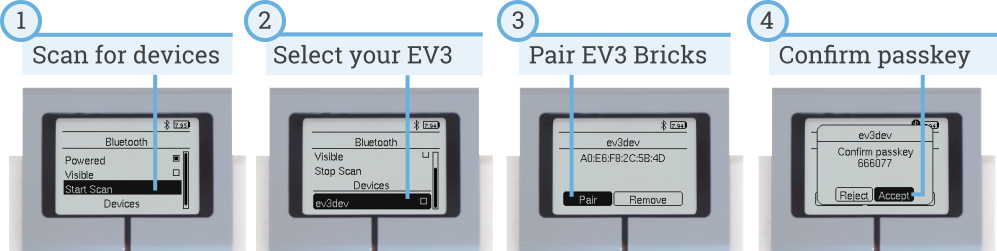
Figure 20 Pairing one EV3 Brick to another EV3 Brick.
When you scan for Bluetooth devices, you’ll see a list of device names. By default, all EV3 Bricks are named ev3dev. Click here to learn how to change that name. This makes it easy to tell them apart.
Repeat the steps in Figure 20 if you want to pair more than two EV3 Bricks.
Server and Client¶
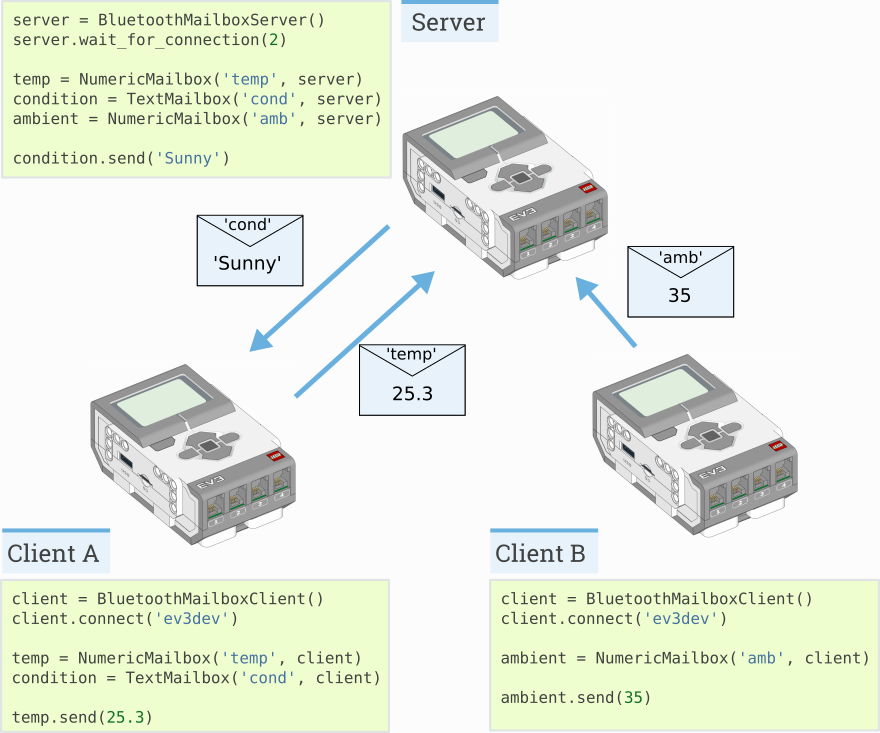
A wireless network consists of EV3 Bricks acting as servers or clients. A example with one server and one client is shown in Figure 21. Messages can be sent in both ways: the server can send a message to the client, and the client can send a message to the server.
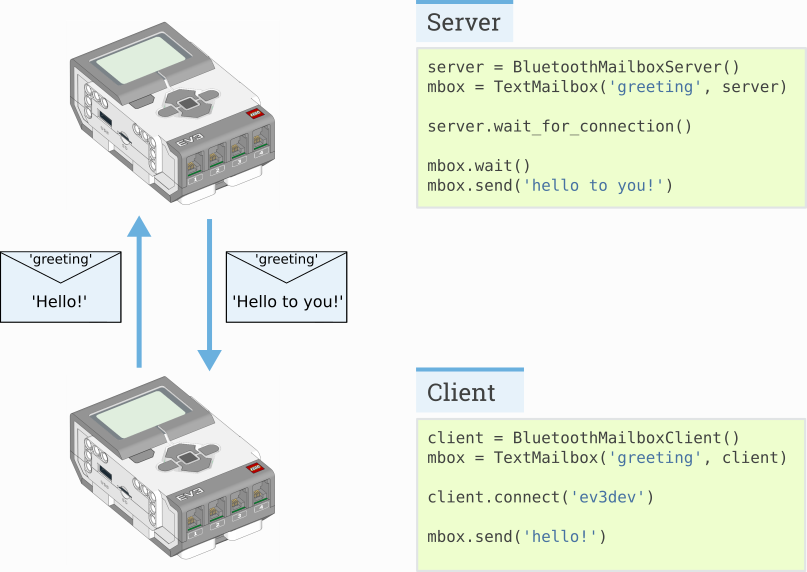
Figure 21 An example network with one server and one clients.
Show/hide full server example
Show/hide full client example
The only difference between the client and the server is which one initiates the connection at the beginning of the program:
- The server must always be started first. It uses the
BluetoothMailboxServerclass. Then it waits for clients using thewait_for_connectionmethod.- The client uses the
BluetoothMailboxClientclass. It connects to the server using theconnectmethod.- After that, sending and receiving messages is done in the same way on both EV3 Bricks.
-
class
BluetoothMailboxServer¶ Object that represents a Bluetooth connection from one or more remote EV3s.
The remote EV3s can either be running MicroPython or the standard EV3 firmware.
A “server” waits for a “client” to connect to it.
-
wait_for_connection(count=1)¶ Waits for a
BluetoothMailboxClienton a remote device to connect.Parameters: count (int) – The number of remote connections to wait for. Raises: OSError– There was a problem establishing the connection.
-
close()¶ Closes all connections.
-
-
class
BluetoothMailboxClient¶ Object that represents a Bluetooth connection to one or more remote EV3s.
The remote EV3s can either be running MicroPython or the standard EV3 firmware.
A “client” initiates a connection to a waiting “server”.
-
connect(brick)¶ Connects to an
BluetoothMailboxServeron another device.The remote device must be paired and waiting for a connection. See
BluetoothMailboxServer.wait_for_connection().Parameters: brick (str) – The name or Bluetooth address of the remote EV3 to connect to. Raises: OSError– There was a problem establishing the connection.
-
close()¶ Closes all connections.
-
Mailboxes¶
Mailboxes are used to send data to and from other EV3 Bricks.
A Mailbox has a name, similar to the “subject” of an email. If two EV3
Bricks have a Mailbox with the same name, they can send messages between them.
Each EV3 Brick can read its own Mailbox, and send messages to the Mailbox on
the other EV3 Brick.
Depending on the type of messages you would like to exchange (bytes, booleans, numbers, or text), you can choose one of the Mailboxes below.
-
class
Mailbox(name, connection, encode=None, decode=None)¶ Object that represents a mailbox containing data.
You can read data that is delivered by other EV3 bricks, or send data to other bricks that have the same mailbox.
By default, the mailbox reads and send only bytes. To send other data, you can provide an
encodefunction that encodes your Python object into bytes, and adecodefunction to convert bytes back to a Python object.Parameters: - name (str) – The name of this mailbox.
- connection – A connection object such as
BluetoothMailboxClient. - encode (callable) – Function that encodes a Python object to bytes.
- decode (callable) – Function that creates a new Python object from bytes.
-
read()¶ Gets the current value of the mailbox.
Returns: The current value or Noneif the mailbox is empty.
-
send(value, brick=None)¶ Sends a value to this mailbox on connected devices.
Parameters: - value – The value that will be delivered to the mailbox.
- brick (str) – The name or Bluetooth address of the brick or
Noneto to broadcast to all connected devices.
Raises: OSError– There is a problem with the connection.
-
wait()¶ Waits for the mailbox to be updated by remote device.
-
wait_new()¶ Waits for a new value to be delivered to the mailbox that is not equal to the current value in the mailbox.
Returns: The new value.
-
class
LogicMailbox(name, connection)¶ Object that represents a mailbox containing boolean data.
This works just like a regular
Mailbox, but values must beTrueorFalse.This is compatible with the “logic” mailbox type in EV3-G.
Parameters: - name (str) – The name of this mailbox.
- connection – A connection object such as
BluetoothMailboxClient.
-
class
NumericMailbox(name, connection)¶ Object that represents a mailbox containing numeric data.
This works just like a regular
Mailbox, but values must be a number, such as15or12.345This is compatible with the “numeric” mailbox type in EV3-G.
Parameters: - name (str) – The name of this mailbox.
- connection – A connection object such as
BluetoothMailboxClient.
-
class
TextMailbox(name, connection)¶ Object that represents a mailbox containing text data.
This works just like a regular
Mailbox, but data must be a string, such as'hello!'or'My name is EV3'.This is compatible with the “text” mailbox type in EV3-G.
Parameters: - name (str) – The name of this mailbox.
- connection – A connection object such as
BluetoothMailboxClient.